How To Convert Measurements
Converting measurements is a skill that will be tested in high school math and science classes, as well as in some college classes. If you do not learn how to do this in high school, you may be in trouble later on down the road. The metric system can seem strange, especially to those of us who have grown up using the U.S. system of measurement. But there is a simple trick for converting those tricky kilometers to centimeters, or whatever else you wish to change. The method shown below is called the Stair Step Method, and is taught in many high school classes when learning to convert measurements.
Step 1
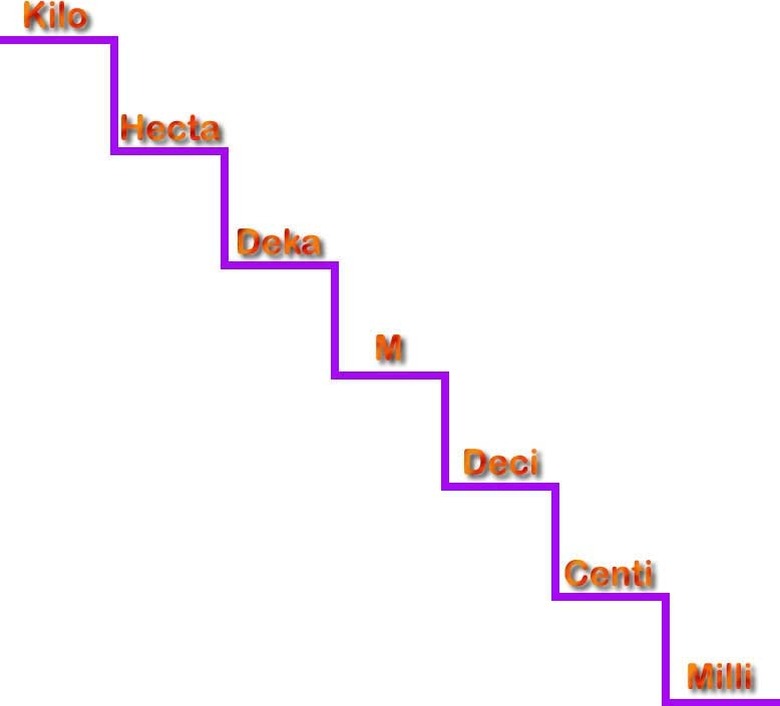
Start by drawing seven stair steps on your paper. Starting with the top step, write the letter K. This stands for Kilo-.
Step 2
Continue to letter the remaining steps as follows (I have written the prefix that goes with each letter in parenthesis): K (kilo-) (first step/top step), H (hecto), D (deca), O (origin/ base unit), d (deci), C (centi), and M (milli). These are the units you will be converting between.
Step 3
Keep in mind that a different type of measurement can be added to each prefix. For example, Kilo- can be kilogram or kilometer. The same with any of the rest. Examples include Centimeter, Hectometer and Deciliter. The Origin, or Base Unit, is a single unit of whatever you are working with. If you are converting meters, then the Origin would simply be "Meter." It could be grams, liters, or meters.
Step 4
Start with what you are converting, to convert something. Let's say you are converting 4 milliliters (mL) to liters (L). Start on the step that says Milli (for milliliters). Then move to the step that says Liters (in this case, the origin/base unit since there is no prefix). Count how many steps you moved, not counting the step you started on. In this case you have gone 3 steps backwards.
Step 5
Take the number you're converting (4) and move the decimal 3 steps backwards, because this is how many steps you moved in that direction. The decimal would be behind the 4, making it 4.0, so it would move 3 places to the left. This gives you an answer of 0.004. Remember that when you move it to the other side of the four, this counts as one place. So 4 mL is equal to 0.004 L.
TL;DR (Too Long; Didn't Read)
Any easy way to remember what order the letters go in on the stairs, is the sentence Kids Have Dropped Over dead Converting Metrics. Just remember the second D is deci, and the O in over stand for Origin. I use a lower case D for deci to make it easier to remember. This method can be applied to any type of metric conversion. Eventually you will be able to remember how to do this in your head. Remember that if you move backwards, then the number gets smaller. If you move forwards, the number gets bigger.
Cite This Article
MLA
Reed, Jessica. "How To Convert Measurements" sciencing.com, https://www.sciencing.com/convert-measurements-2311943/. 24 April 2017.
APA
Reed, Jessica. (2017, April 24). How To Convert Measurements. sciencing.com. Retrieved from https://www.sciencing.com/convert-measurements-2311943/
Chicago
Reed, Jessica. How To Convert Measurements last modified August 30, 2022. https://www.sciencing.com/convert-measurements-2311943/