Cross Product (Vector): Definition, Formula, Properties (W/ Diagrams & Examples)
The product of two scalar quantities is a scalar, and the product of a scalar with a vector is a vector, but what about the product of two vectors? Is it a scalar, or another vector? The answer is, it could be either!
There are two ways to take a vector product. One is by taking their dot product, which yields a scalar, and the other is by taking their cross product, which yields another vector. Which product is used depends on the particular scenario and what quantity you are trying to find.
The cross product of two vectors yields a third vector that points in the direction perpendicular to the plane spanned by the two vectors, and whose magnitude depends on the relative perpendicularity of the two vectors.
Definition of the Cross Product of Vectors
Definition of the Cross Product of Vectors
We first define the cross product of the unit vectors i, j and k (vectors of magnitude 1 that point in the x-, y- and z-component directions of the standard Cartesian coordinate system) as follows:
\(\bold{i\times j} = \bold{k}\
\bold{j\times k} = \bold{i}\
\bold{k\times i} = \bold{j}\
\bold{i\times i} = \bold{j\times j} = \bold{k\times k} = 0\)
Note that these relationships are anti-commutative, that is, if we switch the order of the vectors we are taking the product of, it flips the sign of the product:
\(\bold{j\times i} = -\bold{k} \
\bold{k\times j} = -\bold{i} \
\bold{i\times k} = -\bold{j}\)
We can use the above definitions to derive the formula for the cross product of two three dimensional vectors**. **First, write vectors a and b as follows:
\(\bold{a} = (a_x, a_y, a_z) = a_x\bold{i} + a_y\bold{j} + a_z\bold{k} \
\bold{b} = (b_x, b_y, b_z) = b_x\bold{i} + b_y\bold{j} + b_z\bold{k}\)
Multiplying the two vectors, we get:
\(\bold{a\times b} = (a_x\bold{i} + a_y\bold{j} + a_z\bold{k}) \times (b_x\bold{i} + b_y\bold{j} + b_z\bold{k}) \
= a_xb_x\bold{i\times i} + a_xb_y\bold{i\times j} + a_xb_z\bold{i\times k} \
+ a_yb_x\bold{j\times i} + a_yb_y\bold{j\times j} + a_yb_z\bold{j\times k} \
+ a_zb_x\bold{k\times i} + a_zb_y\bold{k\times j} + a_zb_z\bold{k\times k}\)
Then, using the unit vector relationships above, this simplifies to:
\(\bold{a\times b} = a_xb_y\bold{i\times j} – a_xb_z\bold{k\times i}
- a_yb_x\bold{i\times j} + a_yb_z\bold{j\times k}
+ a_zb_x\bold{k\times i} – a_zb_y\bold{j\times k}\
= (a_xb_y – a_yb_x)\bold{i\times j} + (a_zb_x – a_xb_z)\bold{k\times i} + (a_yb_z – a_zb_y)\bold{j\times k}\
= (a_yb_z – a_zb_y)\bold{i} + (a_zb_x – a_xb_z)\bold{j} + (a_xb_y – a_yb_x)\bold{k}\)
(**Note that the terms whose cross product was 0, are the terms that form the dot product (also called the scalar product)!** This isn't a coincidence.)
In other words:
\(\bold{a\times b} = \bold{c} = (c_x, c_y, c_z) \text{ where} \
c_x = a_yb_z – a_zb_y \
c_y = a_zb_x – a_xb_z \
c_z = a_xb_y – a_yb_x\)
The magnitude of the cross product can be found using the Pythagorean theorem.
The cross product formula can also be expressed as the determinant of the following matrix:
\(\bold{a\times b} = \Bigg|\begin{matrix}
\bold{i}&\bold{j}&\bold{k}\
a_x & a_y & a_z \
b_x & b_y & b_z\end{matrix}\Bigg| \
= \Big|\begin{matrix}a_y & a_z \b_y & b_z\end{matrix}\Big|\bold{i} -\Big|\begin{matrix}a_x & a_z\b_x & b_z\end{matrix}\Big|\bold{j} + \Big|\begin{matrix} a_x & a_y \ b_x & b_y \end{matrix}\Big|\bold{k}\)
\(\text{Where the determinant } \Big|\begin{matrix} a & b \ c & d \end{matrix}\Big| = ad – bc\)
Another, often very convenient, formulation of the cross product is (see the end of this article for the derivation):
\(\bold{a × b} = |\bold{a}| |\bold{b}| \sin(θ) \bold{n}\)
Where:
- |a| is the magnitude (length) of vector a
- |b| is the magnitude (length) of vector b
- θ is the angle between a and b
- n is the unit vector perpendicular to the plane spanned by a and b
Perpendicular Vectors and the Right-Hand Rule
Perpendicular Vectors and the Right-Hand Rule
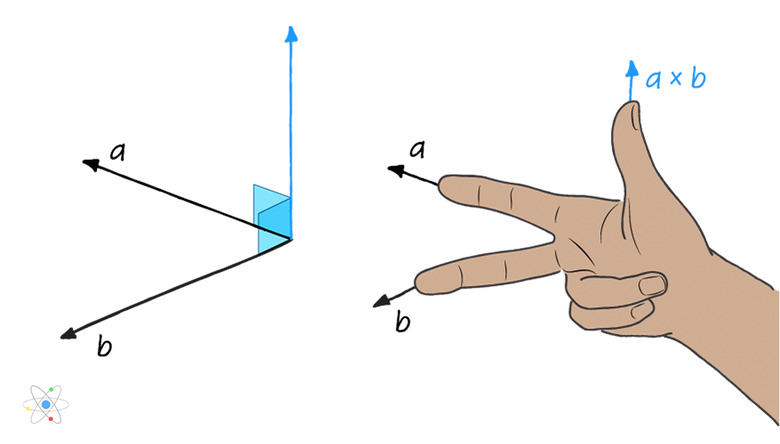
In the description of the cross product, it is stated that the direction of the cross product is perpendicular to the plane spanned by vector a and vector b. But this leaves two possibilities: It might point out of the plane or into the plane spanned by those vectors. The reality is, we can actually choose either as long as we're consistent. The favored direction chosen by mathematicians and scientists alike, however, is determined by something called the right-hand rule.
To determine the direction of a vector cross product using the right-hand rule, point the index finger of your right hand in the direction of vector a and your middle finger in the direction of vector b. Your thumb then points in the direction of the cross product vector.
Dana Chen | Sciencing
Sometimes these directions are difficult to depict on a flat piece of paper, so often the following conventions are made:
To indicate a vector that goes into the page, we draw a circle with an X in it (think of this as representing the tail feathers on the end of the arrow as you look at it from behind). To indicate a vector that goes in the opposite direction out of the page, we draw a circle with a dot in it (think of this as the tip of the arrow pointing out of the page).
 na
na
Properties of the Cross Product
Properties of the Cross Product
The following are several properties of the vector cross product:
\(\#\text{1. If } \bold{a} \text{ and } \bold{b} \text{ are parallel, then } \bold{a\times b} = 0\)
\(\#\text{2. }\bold{a\times b} = -\bold{b\times a}\)
\(\#\text{3. }\bold{a\times (b + c)} = \bold{a\times b} + \bold{a\times c}\)
\(\#\text{4. }(c\bold{a)\times b} = c(\bold{a\times b})\)
\(\#\text{5. }\bold{a\cdot (b\times c}) = \bold{(a\times b)\cdot c}\)
\(\text{Where }\bold{a\cdot (b\times c}) =\Bigg|\begin{matrix} a_x & a_y & a_z \b_x & b_y & b_z\c_x & c_y & c_z\end{matrix}\Bigg|\)
Geometric Interpretation of the Cross Product
Geometric Interpretation of the Cross Product
When the vector cross product is formulated in terms of sin(θ), its magnitude can be interpreted as representing the area of the parallelogram spanned by the two vectors. This is because for a × b, |b|sin(θ) = the height of the parallelogram, as shown, and |a| is the base.
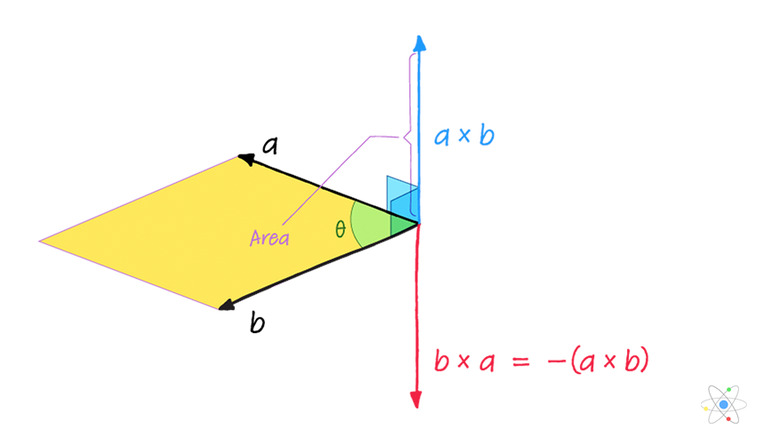 Dana Chen | Sciencing
Dana Chen | Sciencing
The magnitude of the vector triple product **a(b × c)** can in turn be interpreted as the volume of the parallelepiped spanned by the vectors a, b and c. This is because **(b × c)** gives a vector whose magnitude is the area spanned by vector b and vector c, and whose direction is perpendicular to that area. Taking the dot product of vector a with this result, essentially multiplies the base area times the height.
Examples
Examples
**Example 1:** The force on a particle of charge q moving with velocity v in magnetic field B is given by:
\(\bold{F} = q\bold{v\times B}\)
Suppose an electron passes through a 0.005 T magnetic field at velocity 2×107 m/s. If it passes perpendicularly through the field, then the force it will feel is:
\(\bold{F} = q\bold{v\times B} = qvB\sin(\theta)\bold{n} = (-1.602\times 10^{19})(2\times 10^7)(0.005)\sin(90)\bold{n} =-1.602\times 10^{-14}\text{ N}\bold{n}\)
However, if the electron is traveling parallel with the field, then θ = 0, and sin(0) = 0, making the force 0.
Note that for the electron passing perpendicularly through the field, this force will cause it to move in a circular path. The radius of this circular path can be found by setting the magnetic force equal to the centripetal force and solving for radius r:
\(F_{mag} = qvB\sin(90) = qvB = \frac{mv^2}{r} = F_{cent}\
\implies r = \frac{mv}{qB}\)
For the example above, plugging in the numbers yields a radius of about 0.0227 m.
**Example 2:** The physical quantity torque is also computed using a vector cross product. If a force F is applied to an object at position r from the pivot point, the torque **τ** about the pivot point is given by:
\(\bold{\tau} = \bold{r\times F}\)
Consider the situation in which a 7 N force is applied at an angle to the end of a 0.75 rod whose other end is attaches to a pivot. The angle between r and F is 70 degrees, so the torque can be computed:
\(\bold{\tau} = \bold{r\times F} = rF\sin(\theta) = (0.75)(7)\sin(70)\bold{n} = 4.93 \text{Nm }\bold{n}\)
The direction of the torque, n, is found via the right-hand rule. If applied to the image above, this gives a direction coming out of the page or screen. In general, a torque applied to an object will want to cause the object to rotate. The torque vector will always lie in the same direction as the rotation axis.
In fact, a simplified right-hand rule can be used in this situation: Use your right hand to "grab" the rotation axis in such a way that your fingers curl around in the direction the associated torque will want to cause the object to rotate. Your thumb is then pointing in the direction of the torque vector.
Derivation of Cross Product Formula
Derivation of Cross Product Formula
\(\text{Here we will show how the cross product formula } \bold{a × b} = |\bold{a}| |\bold{b}| \sin(θ) \bold{n} \text{ can be derived.}\)
Consider two vectors a and b with angle θ between them. A right triangle can be formed by drawing a line from the tip of vector a to a perpendicular point of contact on vector b.
Using the Pythagorean theorem, we get the following relationship:
\(\Big|\Big(\frac{\bold{a\cdot b}}{|\bold{b}|^2}\Big)\bold{b}\Big|^2 + (|\bold{a}|\sin(\theta))^2 = |\bold{a}|^2\)
\(\text{Where }\Big(\frac{\bold{a\cdot b}}{|\bold{b}|^2}\Big)\bold{b} \text{ is the projection of vector } \bold{a} \text{ onto vector } \bold{b}.\)
Simplifying the expression a little, we get the following:
\(\frac{|\bold{a\cdot b}|^2}{|\bold{b}|^2} + |\bold{a}|^2\sin^2(\theta) = |\bold{a}|^2\)
Next, multiply both sides of the equation by |b|2 and move the first term to the right-hand side to get:
\(|\bold{a}|^2|\bold{b}|^2\sin^2(\theta) = |\bold{a}|^2|\bold{b}|^2 – |\bold{a\cdot b}|^2\)
Working with the right-hand side, multiply everything out and then simplify:
\(|\bold{a}|^2|\bold{b}|^2 – |\bold{a\cdot b}|^2 = [(a_x)^2 + (a_y)^2 + (a_z)^2][(b_x)^2 + (b_y)^2 + (b_z)^2]\ – (a_xb_x + a_yb_y + a_zb_z)(a_xb_x + a_yb_y + a_zb_z) \
= (a_xb_y)^2 + (a_xb_z)^2 + (a_yb_x)^2 + (a_yb_z)^2 + (a_zb_x)^2 + a_zb_y)^2 \
- 2a_xa_yb_xb_y – 2a_xa_zb_xb_z – 2a_ya_zb_yb_z \
= (a_yb_z – a_zb_y)^2 + (a_zb_x – a_xb_z)^2 + (a_xb_y – a_yb_x)^2\
= |\bold{a\times b}|^2\)
Setting the result equal to the left-hand side of the previous equation, we get the following relationship:
\(|\bold{a\times b}| = |\bold{a}||\bold{b}||\sin(\theta)|\)
This shows us that the magnitudes are the same in the formula, so the last thing to do to prove the formula is to show that the directions are also the same. This can be done simply by taking the dot products of a with a × b and b with a × b and showing they are 0, implying that the direction of a × b is perpendicular to both.
Cite This Article
MLA
TOWELL, GAYLE. "Cross Product (Vector): Definition, Formula, Properties (W/ Diagrams & Examples)" sciencing.com, https://www.sciencing.com/cross-product-vector-definition-formula-properties-w-diagrams-examples-13720225/. 28 December 2020.
APA
TOWELL, GAYLE. (2020, December 28). Cross Product (Vector): Definition, Formula, Properties (W/ Diagrams & Examples). sciencing.com. Retrieved from https://www.sciencing.com/cross-product-vector-definition-formula-properties-w-diagrams-examples-13720225/
Chicago
TOWELL, GAYLE. Cross Product (Vector): Definition, Formula, Properties (W/ Diagrams & Examples) last modified March 24, 2022. https://www.sciencing.com/cross-product-vector-definition-formula-properties-w-diagrams-examples-13720225/